Bài viết kỹ thuật, BẢO TRÌ DỰ ĐOÁN, CÂN BẰNG ĐỘNG
Cách cân bằng động # 1 – Thiết lập để Cân bằng

23
Jul
Jul
Cách cân bằng động # 1 – Thiết lập để Cân bằng
Cách cân bằng động # 1 – Thiết lập để Cân bằng. Blog gần đây về khắc phục sự cố cân bằng (https://avitek.vn/meo-su-dung-smc-khi-chuan-doan-mat-can-bang) đã đưa ra một số câu hỏi bổ sung từ độc giả của chúng tôi, vì vậy hãy giải quyết chúng theo thứ tự. Việc đầu tiên là thiết lập để thực hiện công việc cân bằng.
THIẾT BỊ CẦN THIẾT ĐỂ CÂN BẰNG
Nếu bạn đã xem qua danh sách kiểm tra và xác nhận tình trạng mất cân bằng, bạn sẽ cần:
- Một máy để thực hiện các phép đo (Fixturlaser SMC hoặc OneProd Falcon đều tuyệt vời!), Với phần mềm cần thiết.
- Bộ cân bằng, bao gồm ít nhất (1) cảm biến đo độ rung gia tốc đơn và cảm biến laser đo tốc độ vòng quay (hoặc cảm biến đo tốc độ hẹn giờ, được sử dụng trên các máy cân bằng cũ hơn) và dây cáp. Nếu sử dụng cảm biến laser đo tốc độ vòng quay, cũng sẽ cần đến băng phản quang. Băng phải được gắn trên rôto để cân bằng, vì vậy nó có thể được nhắm mục tiêu bằng máy đo tốc độ vòng quay.
- Cục cân bằng nhiều kích cỡ.
- Cân, để đo trọng lượng.
THIẾT LẬP CÂN BẰNG
- Tắt máy và đảm bảo an toàn.
- Gắn cảm biến gia tốc vào ổ trục và hướng có độ rung cao nhất. Nếu độ rung cao nhất nằm trên ổ trục ODE (Đầu ổ đối diện), theo hướng thẳng đứng, hãy đặt cảm biến ở đó.
- Làm sạch bề mặt để gắn băng phản quang vào và gắn nó. Nó có thể được gắn trên rôto, hoặc trục.
- Hướng cảm biến laser đo tốc độ vòng quay về phía băng phản chiếu. Đảm bảo cách xa rôto đủ xa để an toàn (hầu hết các máy đo tốc độ ảnh laser có thể hoạt động khi được lắp cách rôto vài inch).
- Đảm bảo rằng tất cả các dây cáp đều chắc chắn và không bị xoay thiết bị TRƯỚC KHI bạn khởi động máy sao lưu.
QUÁ TRÌNH
Cân bằng rôto yêu cầu ít nhất hai đầu vào:
- Lực – mức độ rung ở tốc độ chạy nhất định. Có thể có rung động từ nhiều nguồn. Nhưng cân bằng chỉ có thể làm giảm độ rung ở tốc độ chạy (1 lần vòng / phút) của rôto. Nó không thể làm giảm độ rung do lệch trục, dây đai, v.v.
- Hướng – góc pha, biểu thị mối quan hệ giữa điểm cao và điểm nặng của rôto. Mặc dù không phải là không thể tính toán, nhưng nó có thể phức tạp, và thông thường, việc tính toán không cần thiết để cân bằng rôto. Đối với mục đích của blog này, chúng ta hãy nghĩ về nó như – rôto rung bao nhiêu và nó rung theo hướng nào.
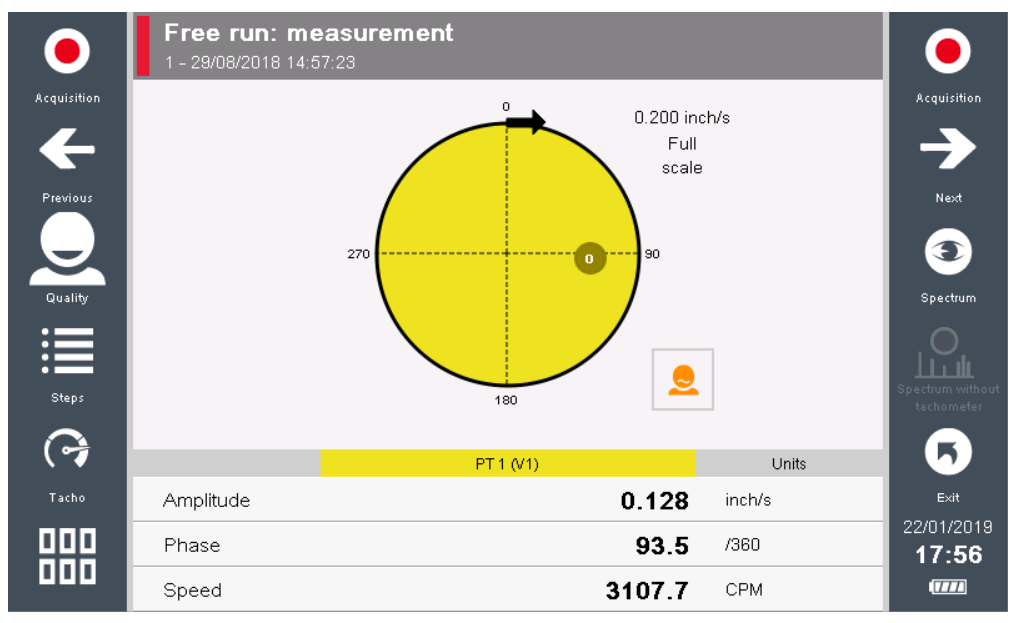
Khi khởi động máy, chương trình cân bằng sẽ cho chúng ta một trạng thái không cân bằng ban đầu, về lực (tính theo biên độ) và hướng (tính bằng độ).
Nguồn: ACOEM
MÁY CÂN BẰNG ĐỘNG SMC – FIXTURLASER

MÁY CHẨN ĐOÁN RUNG ĐỘNG – FALCON ULTIMATE

