KỸ THUẬT PHÂN TÍCH RUNG ĐỘNG
PHÂN TÍCH ĐỘ RUNG: bắt đầu từ đâu?

Jan
PHÂN TÍCH ĐỘ RUNG: bắt đầu từ đâu?
PHÂN TÍCH ĐỘ RUNG: bắt đầu từ đâu? Nhiều kỹ sư bảo trì hoặc nhân viên kỹ thuật sẽ tự hỏi phân tích độ rung là gì và tại sao lại phải phân tích độ rung? Thì đó không phải là nội dung của bài viết này. Bài viết này tập trung vào những người đã biết sơ về độ rung và có nhu cầu tìm hiểu về kỹ thuật phân tích nó.

Kỹ thuật phân tích độ rung là một công cụ hữu ích để theo dõi tình trạng của máy móc thiết bị – đặc biệt là thiết bị quay. Nhiều nhà máy đã áp dụng việc phân tích độ rung đều đặn. Điều này đảm bảo tình trạng của thiết bị được kiểm tra nằm trong giới hạn an toàn cho phép. Và sau đó nếu như có vấn đề phát sinh, việc phân tích phổ sẽ được tiến hành và kèm theo đó là giải pháp để giải quyết vấn đề. Hiện nay, tại Việt Nam – chỉ có các doanh nghiệp lớn như Dầu Khí, Xi Măng và các công ty có vốn đầu tư nước ngoài là áp dụng kỹ thuật này thường xuyên. Các doanh nghiệp khác cũng đang quan tâm và tìm hiểu nhằm giảm chi phí bảo trì, tăng thời gian vận hành máy và tối ưu về mặt phụ tùng.
Khi tiến hành phân tích độ rung, điều quan trọng là chúng ta phải quen thuộc với các thuật ngữ sau.
- Tần số.
- Độ rung dịch chuyển: tính bằng micron hoặc mil.
- Độ rung vận tốc: thông thường là mm/s – nếu ở Việt Nam.
- Độ rung gia tốc: thông thường là mm/s^2 hoặc g. G: gia tốc trọng trường = 9.806,7mm/s^2 – thông thường chúng ta hay dùng g.
- Biên độ: có thể là 0-peak, peak – peak và RMS. RMS là tương đối phổ biến vì nó đại diện cho năng lượng rung động trong sóng rung.
Những thuật ngữ trên được sử dụng rất nhiều trong kỹ thuật phân tích phổ rung động. Ví dụ, một tần số có biên độ lớn bất thường trong dải phổ tần số sau khi thu thập được tự một thiết bị quay. Tín hie65y này sẽ chỉ ra hư hỏng có thể có trong thiết bị quay. Các hỏng hóc này có thể là mất cân bằng động, lệch tâm trục, lỏng cơ khí, vòng bi bị hỏng hoặc là kết hợp của tất cả lỗi trên.
Độ rung từ máy phát ra thông thường sẽ bao gồm tần số chính của máy.
Tần số này có thể dễ dàng xác định thông qua tốc độ quay mà người ta hay gọi là F0, 1X. Tùy theo định nghĩa của mỗi hãng sản xuất máy phân tích. Trên phổ tần số cũng bao gồm các sóng hài sinh ra từ tần số chính là số nguyên lần của tần số chính. Chúng ta gọi là 2X, 3X. Và bao gồm các rung động phát ra từ các nguồn khác như vòng bi, bánh răng. Tất cả các rung động này đều được thể hiện trên biểu đồ phổ và chứa đựng rất nhiều thông tin. Biều đồ phổ này cần được phân tích bởi chuyên gia phân tích hoặc trí thông minh nhân tạo Accurex.
Đôi khi, một lực có tần số cố định nào đó vô tình trùng với tần số tự nhiên. Khi này hiện tượng cộng hưởng sẽ xảy ra làm cho hệ thống rung động một cách khủng khiếp. Các kỹ sư thông thường sẽ tránh tần số tự nhiên này, vì họ không muốn hiện tượng cộng hưởng phá hủy hệ thống và có thể gây ra thảm họa.
Hãy xem xét một vài ví dụ về các thiết bị quay cơ bản và các lỗi đặc trưng có thể xuất hiện rõ rệt trên miền tần số.
- Mất cân bằng động: thường xuất hiện tại tần số bằng tốc độ quay 1XRPM của chi tiết máy bị mất cân bằng động. Lỗi này thông thường xảy ra ở quạt, trục nghiền, bơm và các vít tải.
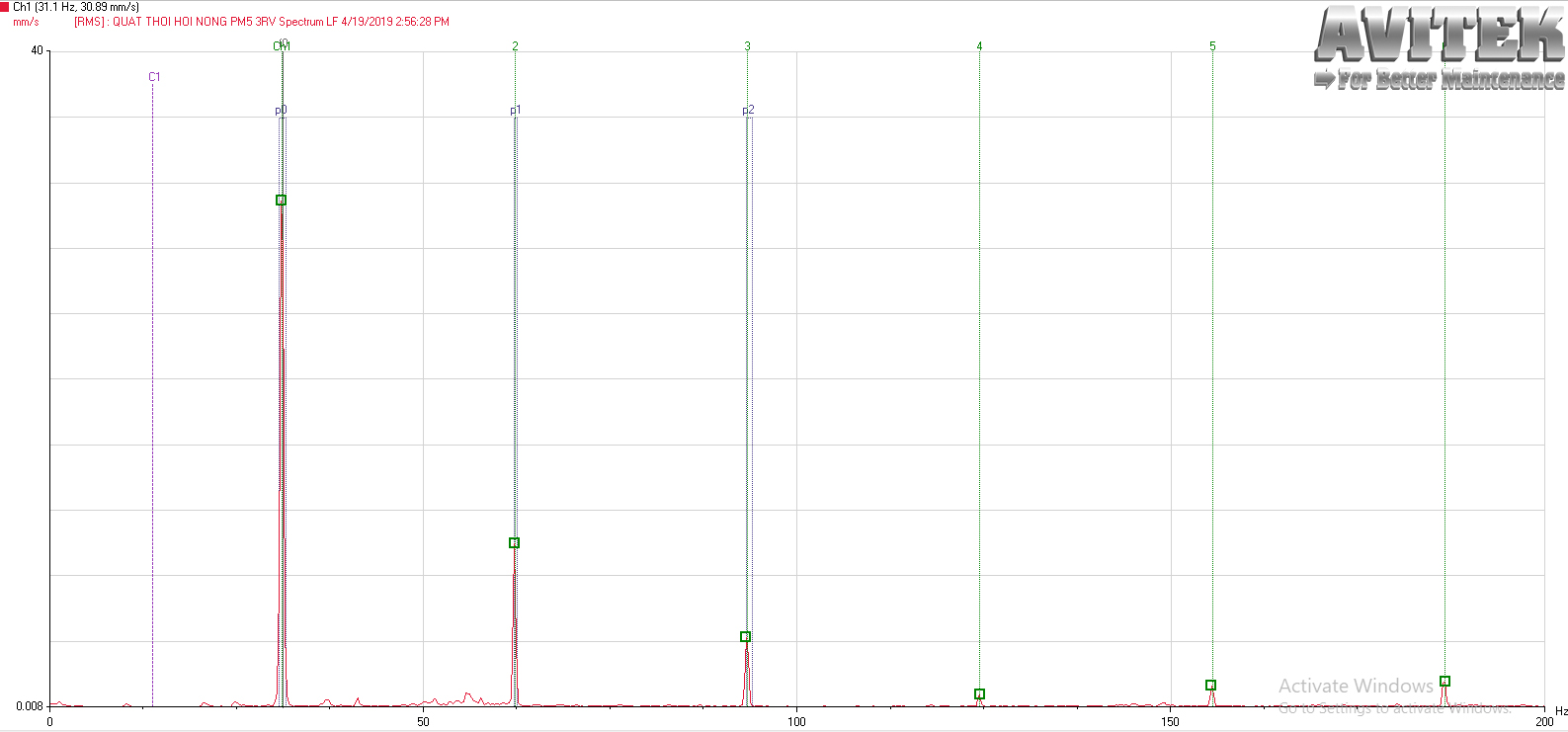
Tần số 1X có biên độ 30mm/s theo hướng ngang – đây là hiện tượng mất cân bằng động không thể chối cãi.
- Lệch tâm trục – có thể là 1X, 2X… tùy theo lệch góc hoặc song song. Không giới hạn trong việc khớp nối, phổ cũng có thể chỉ rõ việc lệch Puly hoặc đai.
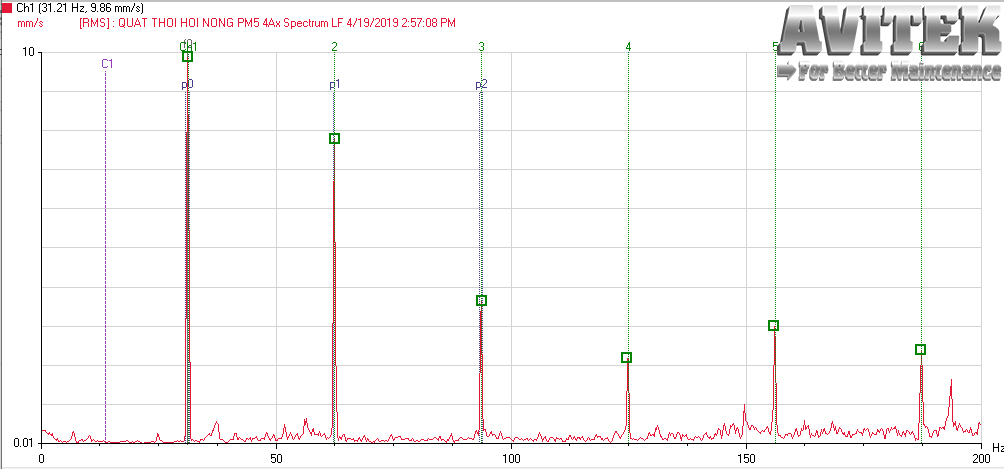
Đây có thể là một phổ điển hình của hiện tượng lệch tâm trục – lệch góc. Đề chắc chắn thì chúng ta cần xác định theo 2 hướng còn lại – đặc biệt là hướng dọc trục.
- Lỏng cơ khí: thể hiện ở 3X, 4X, 5X… giống như hình bên trên. Hiện tượng này có thể do lỏng chân đế, lỏng gối, lỏng lưng vòng bi hay bất cứ thành phần nào đó cần lắp chặt.
- Đai mòn: thông thường sẽ phát hiện ra tần số đai trên biểu đồ phổ. Tần số nhỏ hơn tần số vòng quay – 0.4 – 0.6 F0. Nên cẩn thận vì nó có thể trùng với tần số rế (vòng cách) của vòng bi. Tuy nhiên, tần số của rế là khá yếu.
- Hư hỏng vòng bi: thông thường là phổ gia tốc tại miến tần số trung bình và cao và tín hiệu khá yếu.
Khi tiến hành thu thập dữ liệu cho việc phân tích dữ liệu. Chúng ta cần phải đảm bảo thu thập chính xác để dễ dàng cho công việc phân tích. Sau đây là một vài gợi ý cho việc thu thập dữ liệu:
- Luôn luôn đảm bảo thu thập dữ liệu tại cùng một điểm cho mọi lần thu thập. FALCON có máy ảnh tích hợp sẽ giúp chúng ta dễ dàng nhận ra điểm cần gắn cảm biến.
- Đảm bảo các điều kiện vận hành giống nhau khi thu thập.
- Luôn lưu lại tốc độ khi thu thập dữ liệu: Falcon có tích hợp đèn đo tốc độ. Dễ dàng phát hiện tốc độ của máy sau khi đo.
Bên trên là các kỹ thuật cơ bản tham khảo theo VibrAlign và có kèm ý kiến của người dịch. Nếu các bạn có yêu cầu về các bài viết khác hoặc có ý kiến chỉnh sửa vui lòng góp ý kiến. Chúng tôi trân trọng bất cứ ý kiến nào của các bạn nhằm góp phần xây dựng một cộng đồng bảo trì dự đoán ngày càng mạnh mẽ tại Việt Nam.
– Trần Duy Hoài –
