CÂN BẰNG ĐỘNG
Máy cân bằng động tại xưởng – Chúng hoạt động như thế nào?

Apr
Cân bằng động là kỹ thuật hết sức quan trọng trong việc bảo trì máy móc. Các nhà máy khi bảo trì bảo dưỡng cũng hay thuê các dịch vụ ở ngoài làm việc này. Để giúp các chuyên viên bảo trì nhà máy nắm bắt được kỹ thuật này, chúng tôi xin gửi đến các bạn bài viết “Máy cân bằng động tại xưởng – Chúng hoạt động như thế nào?”.

Máy cân bằng động tại xưởng – Chúng hoạt động như thế nào?
I – Máy cân bằng động tại xưởng là gì?
Máy cân bằng động đo độ rung ( máy chịu lực mềm ) hoặc lực ly tâm ( máy chịu lực cứng ). Thông tin này không hữu ích cho mục đích cân bằng động. Vì vậy, nó được chuyển đổi thành thông tin thực tế mà người vận hành có thể sử dụng để cân bằng. Chẳng hạn, thông tin được đưa ra theo định dạng ” khối lượng đó sẽ bị loại bỏ (hoặc thêm vào) ở góc này “. Các hệ thống thiết bị cân bằng hiện đại hiển thị thông tin này theo cách đồ họa và dễ hiểu, giúp người vận hành thực hiện trực quan và hiệu quả để thực hiện chỉnh sửa mất cân bằng.
II – Phân loại máy cân bằng động tại xưởng:
Máy cân bằng động chủ yếu được phân loại là ổ trục cứng hoặc ổ trục mềm. Máy cân bằng là một thiết bị đo lường cho sự mất cân bằng tĩnh hoặc động. Nó được thiết kế sao cho một rôto có thể được đặt trên máy để đo sự mất cân bằng.
Một thiết kế điển hình có 2 bệ, với một số loại vòng bi lăn trên đầu. Một rôto được đặt trên các ổ trục này để rôto có thể xoay dễ dàng. Một dây đai được quấn quanh rôto và được điều khiển bởi một động cơ điện để làm cho rôto quay. Các thuật ngữ “ổ trục mềm” và “ổ trục cứng” chỉ ra cách rôto được hỗ trợ trên bệ đỡ.
các loại máy cân bằng động tại xưởng
Nếu giá đỡ rôto có thể di chuyển tự do (mềm), máy được gọi là máy cân bằng ổ trục mềm.
Điều này sẽ dẫn đến sự hỗ trợ của rôto để di chuyển (rung). Chuyển động được đo bằng cảm biến rung.
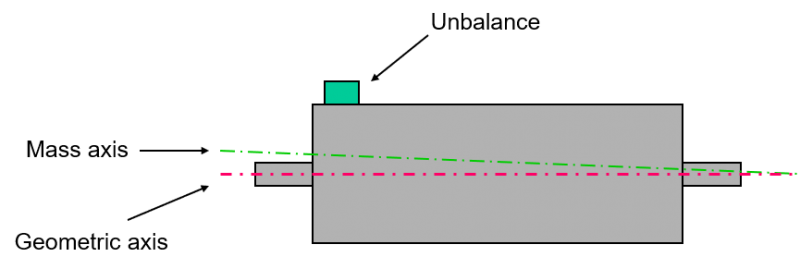
| Một tác động gián tiếp của sự mất cân bằng động là Rung
Lượng rung phụ thuộc vào một số yếu tố, ví dụ: Khối lượng của phần quay |
Nếu rôto được hỗ trợ theo kiểu cứng (cứng), máy được gọi là máy cân bằng ổ trục cứng.
Trong các máy chịu lực cứng, giá đỡ rôto cứng. rôto quay không thể rung; thay vào đó, các lực mất cân bằng được đo bằng cảm biến lực (không phải cảm biến rung).
| Một tác động trực tiếp của sự mất cân bằng động là Lực ly tâm F = mr w² |
III – Các kỹ thuật cân bằng động tại xưởng:
Máy cân bằng hiện đại có thể đo sự mất cân bằng 1 mặt phẳng, mất cân bằng 2 mặt phẳng và mất cân bằng tĩnh / cặp. Tuy nhiên, sự mất cân bằng tĩnh / cặp thường không được đo trực tiếp mà được tính từ sự mất cân bằng 2 mặt phẳng.

Cân bằng động tại xưởng 1 mặt phẳng
Cân bằng động tại xưởng 2 mặt phẳng
Máy cân bằng ổ trục cứng được hiệu chỉnh một lần và có thể đo sự mất cân bằng của rôto mà không cần chạy thử. Nói một cách đơn giản, nó tương tự như bạn cân trọng lượng trong phòng tắm: Sau khi cân đã được hiệu chỉnh (bởi nhà sản xuất), bạn chỉ cần bước lên bàn cân và nó đọc trọng lượng của bạn.Hiệu chuẩn ổ trục cứng có thể áp dụng cho các loại hình học rôto khác nhau phù hợp với kích thước, khối lượng và đường bao tốc độ của một máy nhất định. Hiệu chuẩn ổ trục phải được kiểm tra định kỳ và nếu cần hiệu chuẩn lại phải được thực hiện.
Máy cân bằng động tại xưởng – Chúng hoạt động như thế nào?
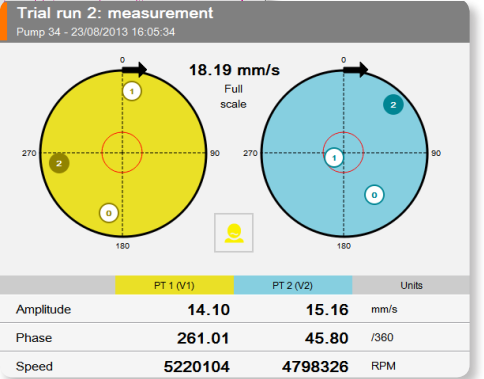
Máy cân bằng ổ trục mềm phải được hiệu chuẩn cho từng loại rôto. Các phép đo 1 mặt phẳng yêu cầu hai lần hiệu chuẩn và cân bằng 2 mặt phẳng yêu cầu ba lần hiệu chuẩn. Các lần chạy này được gọi là:
1. Chạy tham chiếu
2. Chạy hiệu chuẩn thứ nhất (hoặc chạy thử lần 1)
3. Chạy hiệu chỉnh lần 2 (hoặc chạy lần 2) Sau khi chạy hiệu chuẩn xong, các hệ số ảnh hưởng sẽ được tính toán và áp dụng cho phép đo ban đầu (tham chiếu chạy). Bây giờ khối lượng thử nghiệm được loại bỏ khỏi rôto và kết quả mất cân bằng được hiển thị. Thiết bị cân bằng hiện đại có thể lưu trữ các hệ số ảnh hưởng này cho bất kỳ rôto cụ thể nào và có thể gọi lại các hệ số này từ bộ nhớ rôto khi rôto được gọi lại cho phép đo mới.
CÔNG TY CỔ PHẦN KỸ THUẬT THIẾT BỊ ÂU VIỆT
CHUYÊN CÂN BẰNG ĐỘNG – CÂN ĐỒNG TÂM TRỤC – PHÂN TÍCH RUNG ĐỘNG – KHỬ RUNG TÔNG THỂ – SIÊU ÂM CÔNG NGHIỆP.
ĐC: 113/4D Cống Lở, Phường 15, Quận Tân Bình, TPHCM.
SỐ ĐT: 0982 150 978 – 02873040880
Email: sales.admin@avitek.vn Website: www.avitek.vn
