CÂN BẰNG ĐỘNG
CÂN BẰNG ĐỘNG QUẠT CHO NHÀ MÁY GIẤY – AVITEK.VN

Oct
Cân bằng động quạt cho nhà máy giấy luôn là bài toán khó chịu đối với kỹ sư bảo trì. Bởi vì không chỉ cần người có kiến thức mà còn phải có kinh nghiệm về cân bằng động. Thậm chí sau khi đã cân bằng động mà độ rung của quạt vẫn không giảm hoặc giảm không đáng kể. Bài viết dưới đây sẽ mô tả chi tiết từng bước về quá trình này.
Cám ơn kỹ sư Trần Duy Hoài (Vibration analysis CAT II) đã cung cấp thông tin và hình ảnh để chúng tôi thực hiện bài viết này.
I – ĐÁNH GIÁ MÁY MÓC.
Trước khi thực hiện việc cân bằng động nhằm giảm độ rung cho cơ hệ máy quay thì chúng ta nên có một vài đánh giá và nhận định sơ bộ. Điều này sẽ giúp tiết kiệm thời gian cũng như đạt hiệu quả cao trong công việc.
- Máy có khả năng xảy ra mất cân bằng động hay không? Những máy móc có khả năng xảy ra mất cân bằng động thường là các rotor có đường kính lớn (200 mm đến vài mét) và tốc độ vòng quay cao, như:
- Quạt hút, quạt thổi…
- Bơm công nghiệp.
- Máy nghiền búa, trục nghiền, trục máy ép viên…
- Các thiết bị đặc chủng.
- Máy có gây ra tiếng ồn cao và rung lắc dữ dội?
- Nhiệt độ có tăng cao tại gối vòng bi?
Với khuôn khổ bài viết này chúng tôi đề cập đến quạt hút cho nhà máy giấy, đây là một thiết bị hết sức quan trọng vì nó hút khí nóng và cung cấp cho quá trình sấy. Nếu quạt hút này có vấn đề gì, khả năng ảnh hưởng đến sản xuất cũng như chất lượng sản phẩm là rất nhiều. Vậy nên việc đảm bảo an toàn và rung động của cơ hệ này là hết sức quan trọng.

cân bằng động cho nhà máy giấy
II- ĐO ĐẠC VÀ CHẨN ĐOÁN.
Việc đo đạc và chẩn đoán được thực hiện bằng máy phân tích độ rung FALCON do hãng ONEPROD / Pháp sản xuất.
Trình tự đo: tiến hành đo đạc tại tất cả các gối vòng bi để nhận được tất cả các dữ liệu cần thiết phục vụ cho quá trình đánh giá tình trạng thiết bị. Các thông số cần xác định như sau:
- Vib / độ rung gia tốc (g): The RMS Value of Acc. Vib / Giá trị độ rung gia tốc tính theo g, tại mỗi gối theo 3 hướng.
- Defect factor / chỉ số hỏng hóc vòng bi: Using for detect bearings only / đây là chỉ số giúp phát hiện hỏng hóc của vòng bi theo 3 hướng tại mỗi gối.
- SFi / chỉ số shock: Shock finder in each position with 3 directions / Chỉ số lọc shock tự động của ACCUREX theo 3 hướng – thích hợp cho lỏng cơ khí và hộp số.
- HMx / số họ phổ xuất hiện: A quick tools to see if we need to do further analysis / Công cụ để chúng ta xem xét liệu có cần phân tích sâu thêm bằng cách phân tích phổ.
- LF (low frequency) / Độ rung gia tốc (vận tốc) tại tần số thấp: This mainly use for Structural of Geometry damaged / Chỉ số này để phân tích hư hỏng kết cấu máy.
- MF (Medium frequency) / Độ rung gia tốc (vận tốc) tại tần số trung bình: This mainly use for Structural or Bearings, Gears defected / Chỉ số này để phân tích hư hỏng kết cấu máy. vòng bi và hộp số.
- HF (High frequency) / Độ rung gia tốc (vận tốc) tại tần số cao: This mainly use for Gears, Bearings, Lubrication and Cavitation / Chỉ số này để phân tích hư hỏng vòng bi, hộp số, bôi trơn và xâm thực bơm.
- Time wave / Sóng thời gian: Time wave at each bearings with 3 direction / sóng thời gian tại mỗi gối theo 3 hướng. Đơn vị là g và s.

các thông số rung động cần đo
Chẩn đoán: tiến hành chẩn đoán hư hỏng bằng công cụ chẩn đoán tự động tích hợp trí thông minh nhân tạo có sẵn trong máy FALCON / ONEPROD:
- Lỗi mất cân bằng động: nếu có hiện tượng mất cân bằng động, máy sẽ báo bằng tiếng Anh hoặc tiếng Việt.
- Vị trí mất cân bằng động: Khi đi vào chi tiết của lỗi mất cân bằng động, máy sẽ báo vị trí mất cân bằng động. Nếu máy báo ở vị trí số 3 hoặc 4, chúng ta tiến hành cân bằng động ngay lập tức.

Máy hiển thị lỗi và vị trí mất cân bằng động của quạt
Phân tích: với lỗi mất cân bằng động, việc phân tích là rất dễ dàng – chỉ cần nhìn vào phổ tần số thấp nếu chúng ta thấy phổ cao tại vị trí 1X (tốc độ vòng quay) hoặc fo – điều này có nghĩa là máy đã mất cân bằng động. Chúng ta có thể xem phổ ngay tại máy FALCON / ONEPROD hoặc qua màn hình.
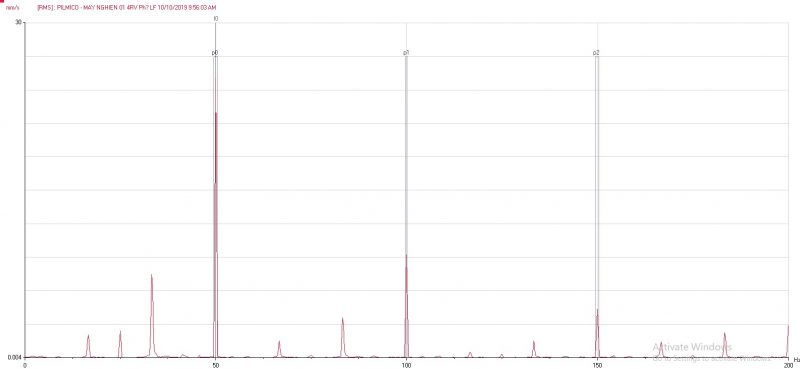
Phổ mất cân bằng động rất rõ ràng.
III- CÂN BẰNG ĐỘNG.
1.Chuẩn bị.
- Môi trường làm việc ngăn nắp và sạch sẽ là ưu tiên hàng đầu. Bụi bẩn là một trong những nhân tố gây mất cân bằng động tương đối.
- Liên lạc giữa người vận hành máy và người cân bằng động là nhân tố ưu tiên bởi vì điều này sẽ ảnh hưởng đến sự an toàn trong quá trình thao tác.
- Cảm biến độ rung phải phù hợp: cảm biến gia tốc tiêu chuẩn với độ nhạy 100 mV/g là phù hợp.
- Cảm biến đo pha và băng phản quang phải còn mới và truyền tín hiệu tốt.
- Thiết bị tốt và được hiệu chuẩn đầy đủ sẽ quyết định hiệu suất công việc.

Thiết bị tốt và được hiệu chuẩn đầy đủ sẽ quyết định hiệu suất công việc.
2.Xác định thông số.
Các thông số cần xác định khi cân bằng động:
- Đường kính để lắp các khối lượng bù.
- Vị trí của cảm biến đo độ rung và cảm biến đo pha.
- Chất lượng cân bằng động.
- Khối lượng Rotor – cánh quạt.
- Số cánh quạt (số điểm có thể gắn trọng lượng bù).
Tiến hành nhập các thông số vào máy Falcon.
3.Gá phần cứng.
Sau khi thiết lập thông số trên máy, chúng ta tiến hành gá các phần cứng (cảm biến, đo pha) lên hệ gối đỡ:
- Cảm biến đo độ rung: tốt nhất nên gá theo phương ngang, sẽ hạn chế lực do lỏng cơ khí tác động đến kết quả cân bằng động.
- Cảm biến đo pha: phải gắn chắc chắn và đảm bảo băng keo phản quan phải phản hồi tín hiệu một cách trung thực.
Dây kết nối phần cứng đến thiết bị không nên quá ngắn, gây mất an toàn cho thiết bị và người vận hành.
4.Chạy thử – lần đầu (free run).
Tiến hành chạy ban đầu và đo đạc lượng mất cân bằng. Chúng ta nên chờ cho máy chạy ổn định và tiến hành đo đạc, việc đo nên được thực hiện lặp lại 2 – 3 lần để đảm bảo kết quả là đồng nhất.
Kết quả: sẽ thể hiện lượng mất cân bằng thông qua độ rung. Góc pha mất cân bằng động – gần đúng và có thể lệch pha.
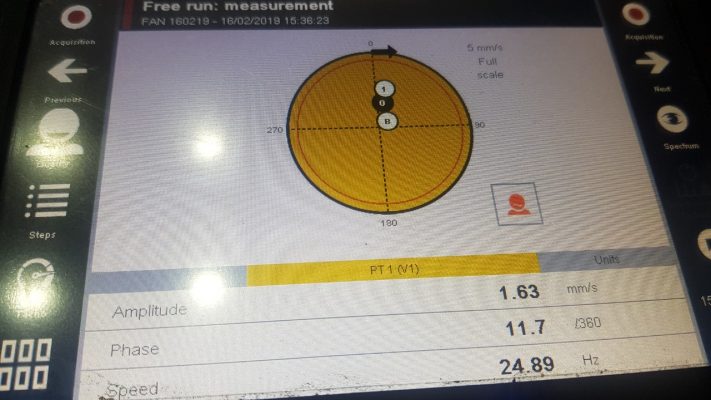
Độ rung gây bởi mất cân bằng động lúc này là 1.63 mm/s
5.Chạy thử – khối lượng thử.
Chính vì sau khi chạy thử (free run) máy chỉ cho góc pha một cách tương đối nên chúng ta cần phải chạy thử với trọng lượng thử.
Oneprod Falcon có chức năng đề xuất cục thử và góc thử, chúng ta nên tuân thủ càng gần với khuyến cáo nhất của máy thì càng tốt.
Sau khi chạy thử máy sẽ báo trọng lượng cần thêm vào hoặc bớt đi, tùy lựa chọn của khách hàng.
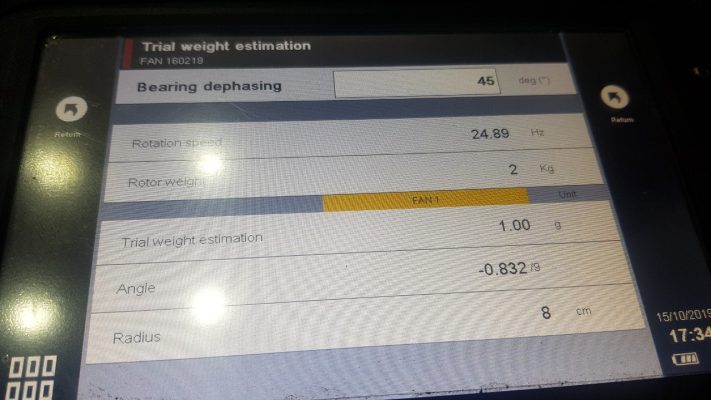
Chạy thử – khối lượng thử là 1.00 g
6.Cân bằng động.
Với sự chỉ dẫn đầy đủ của máy Falcon, chúng ta chỉ cần hàn khối lượng cần thiết tại ngay vị trí chỉ định của máy. Sau đó tiến hành đo đạc lại.
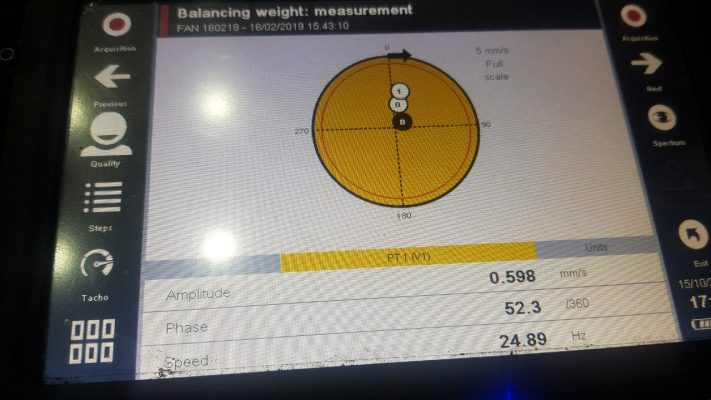
Sau khi gắn trọng lượng bù, độ rung đã giảm một cách đáng kể xuống còn 0.598 mm/s.
7.Cân bằng tinh – trim.
Nếu như chúng ta chưa thỏa mãn với kết quả cân bằng động, việc cân bằng ở giai đoạn trim (tinh chỉnh) có thể tiến hành tiếp. Nguyên lý tương tự như quá trình cân bằng động với sự tính toán của máy. Tiến hành tiếp tục đến khi nào đạt được kết quả mong muốn.
IV- XỬ LÝ KHÁC.
Bên cạnh việc cân bằng động, những thao tác khác như: cân tâm trục, cân đai (puly), kiểm tra bôi mỡ vòng bi, kiểm tra lỏng cơ khí (lỏng lưng bạc đạn) hoặc lỏng bulong… cũng giúp tìm ra giải pháp để giảm độ rung. Chúng tôi sẽ hướng dẫn các hướng xử lý khác trong các bài viết sau này.
V- KẾT LUẬN.
Cân bằng động là một việc không khó nhưng đòi hỏi sự tỉ mỉ và một thiết bị đo với độ phân tích cao. Ngày nay, với sự phát triển của khoa học kỹ thuật việc cân bằng động có thể tiến hành với bất cứ ai. Tuy nhiên, việc xác định nguyên nhân gây rung động do mất cân bằng thực sự là một quá trình cần được đào tạo và hướng dẫn bởi những trung tâm có uy tín.
VIDEO MINH HỌA

TÔI CẦN ĐẶT HÀNG CÂN BẰNG ĐỘNG CHO QUẠT CÔNG NGHIỆP THEO TIÊU CHUẨN ISO 14694
LH 0869132478