CÂN BẰNG ĐỘNG, LÝ THUYẾT KỸ THUẬT CÂN BẰNG ĐỘNG
Xử lý lỗi cân bằng động Roto cho Motor

Aug
1- Tại sao cần cân bằng đồng Roto
Cân bằng động roto là một kỹ thuật xử lý rung động khá phổ biến hiện nay. Việc Motor vận hành trong thời gian dài, thì việc mất cân bằng động là có thể xảy ra. Như biến dạng cánh, xô lệch các vị trí…

Việc mất cân bằng động gây ra rung động rất lớn, nếu không được căn chỉnh tốt. Có khả năng phá hủy kết cấu hoặc gây hư hỏng thứ cấp.
2- Cách khắc phục quá trình mất cân bằng động
Để phát hiện chắc chắn lỗi mất cân bằng động tại Motor, thì cần kiểm tra bằng rung động
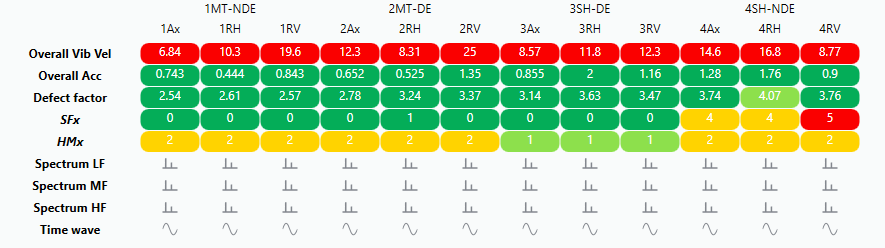
Việc đo đạc bằng phương án phân tích cho thấy các lỗi rất rõ ràng. Chúng ta phân tích ra được trong đó có lỗi mất cân bằng động.
3- Tiến hành công việc cân bằng động
3.1 Kiểm tra và vận chuyển Motor về xưởng Cân bằng động
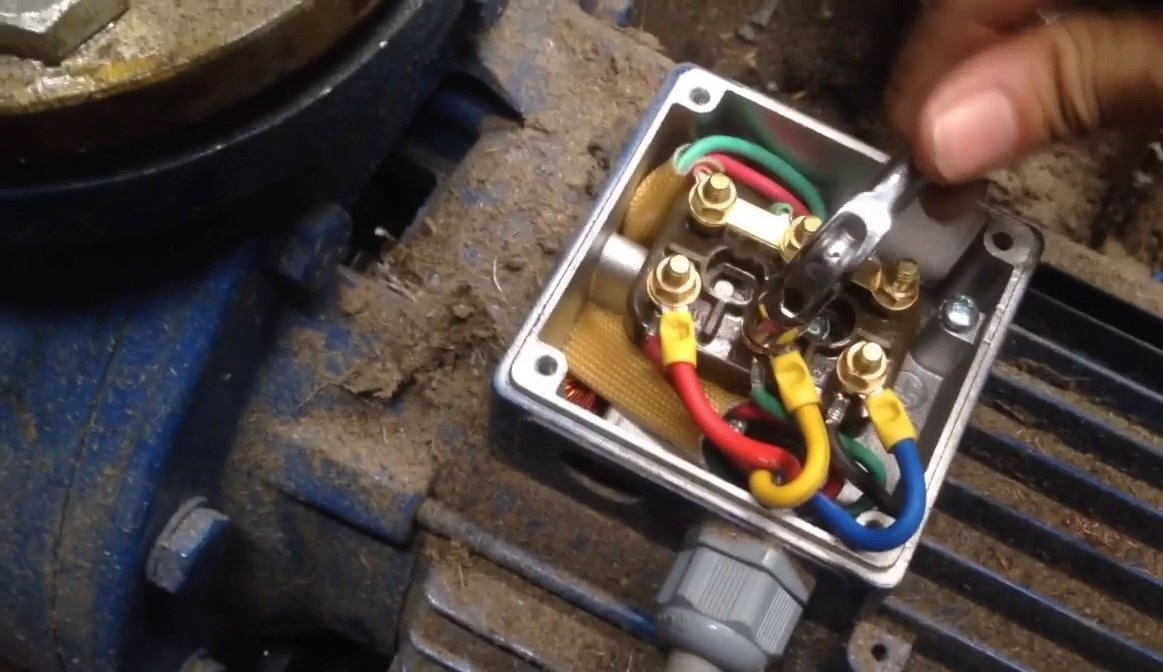
Tháo dây điện đang đấu nối với Motor. Kiểm tra tháo hết các chân đế Motor, tháo các khớp nối để chuẩn bị vận chuyển Motor về xưởng
3.2 – Rút Roto ra khỏi Motor và gá lắp đặt lên máy cân bằng động
Việc rút Roto phải thật cẩn thận và dùng vãi hoặc Nilon phủ vỏ Motor lại để tránh bụi bám vào trong lòng Motor
Sau đó chúng tôi dùng cầu điện để gá lên bệ đỡ và đầu dẫn động của thiết bị

Các bước tiếp theo tuần tự
- Lắp đặt Roto và cố định lên giá đỡ
- Khóa các vị trí trục để tránh bị xục xịch trong quá trình vận hành
- lắp đầu dẫn động vào Roto
- Đánh số trên Roto
- Dán băng phản quang
- Lắp cảm biến độ rung lên 2 đầu
Sau đó chúng ta Setup máy và cân bằng động thôi
4- Các bưới cân bằng động Roto
4.1 Chạy lần đầu tiên ( Free run)
Việc chạy lần đầu tiên khi nguyên trạng của Motor
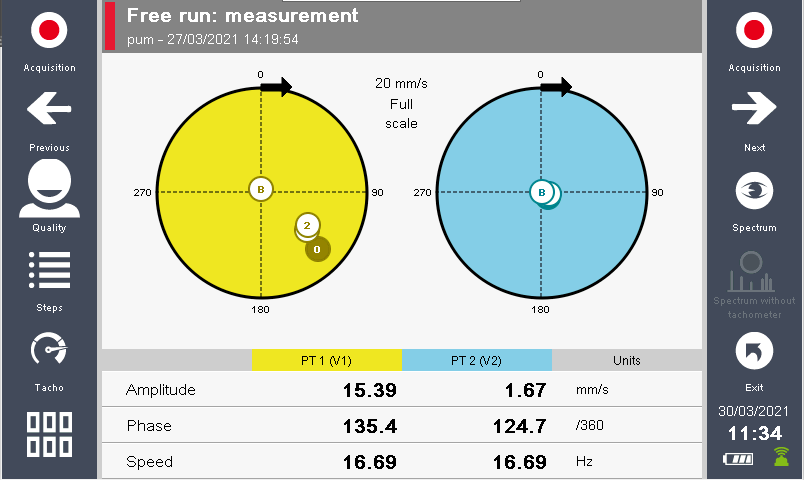
Sau khi máy đã đo ra độ rung tại mặt phẳng 1 là 15.39 mm/s và mặt phẳng 2 là 1.67 mm/s
4.2 Chạy lần thứ 2 ( Trial run 1)
Sau khi đã tính toán và lắp khối lượng thử lên Roto theo tính toán như sau
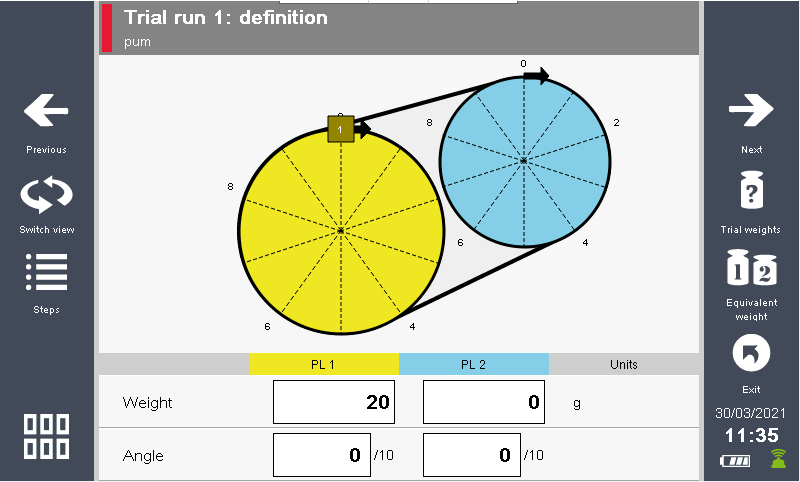
Chúng tôi lắp 20g lên mặt phẳng 1 tại vị trí góc 0. Kiểm tra xung quanh đã an toàn và lắp đặt đã chắc chắn và chúng ta tiến hành chạy lại lần thứ 2
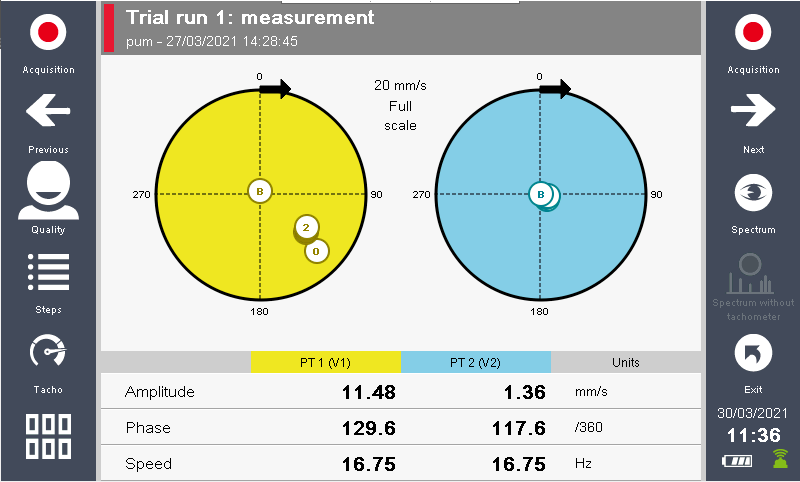
Sau khi đã chạy lần thứ 2 độ rung tại mặt phẳng 1 đã giảm đáng kể từ 15.39mm/s xuống 11.48 mm/s
Khối lượng thử đã đạt yêu cầu
4.3 – Chạy lần thứ 3 ( Trial run 2)
Mặt phẳn 1 đã đạt yêu cầu về khối lượng thử. Chúng ta tiếp tục qua để cân chỉnh tại mặt phẳn 2
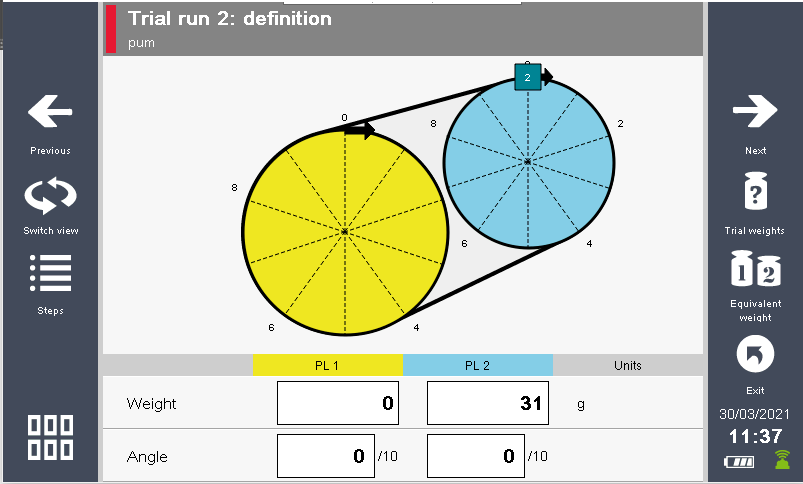
Sau khi đã lắp 31 g vào vị trí cánh số 0 trên mặt phẳn 2, tại mặt phẳng 1 chúng ta không lắp khôi lượng thử
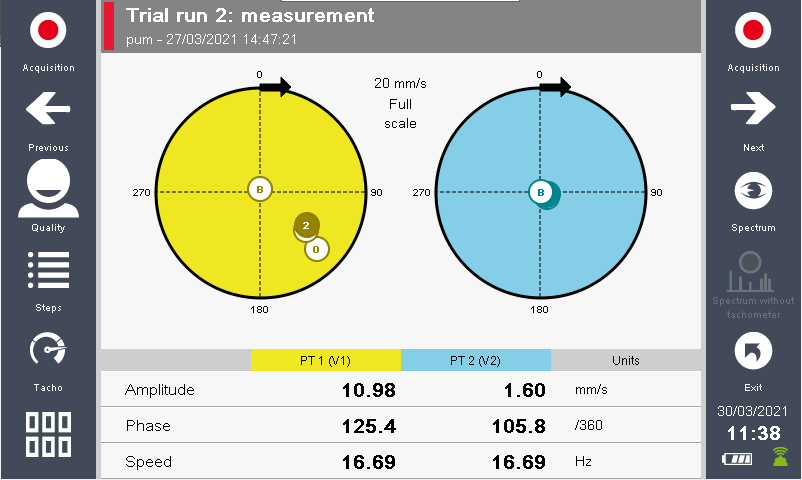
Độ rung tại mặt 2 không giảm mà có dấu hiệu tăng nhẹ, nhưng tại vị trí góc Phase có thay đổi 30 độ
với điều kiện này khối lượng vẫn đạt yêu cầu
4.4 – Chạy lần thứ 4 ( Balancing)
Sau khi đã thử 2 lần thành công chúng ta bắt đầu tiếp tục tính toán và cho ra kết quả để lắp cố định khối lượng balancing
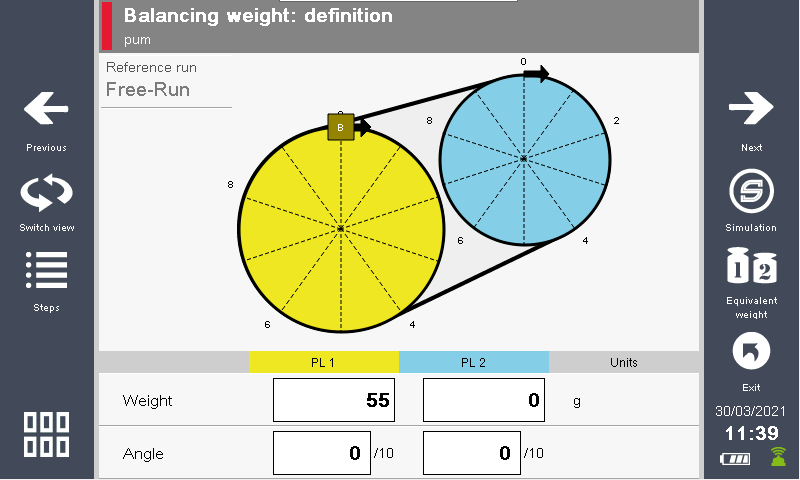
Sau khi đã tính toán thì chúng ta chỉ lắp khối lượng ở mặt 1 để giảm độ rung của mặt 1 và có ảnh hưởng đến mặt 2
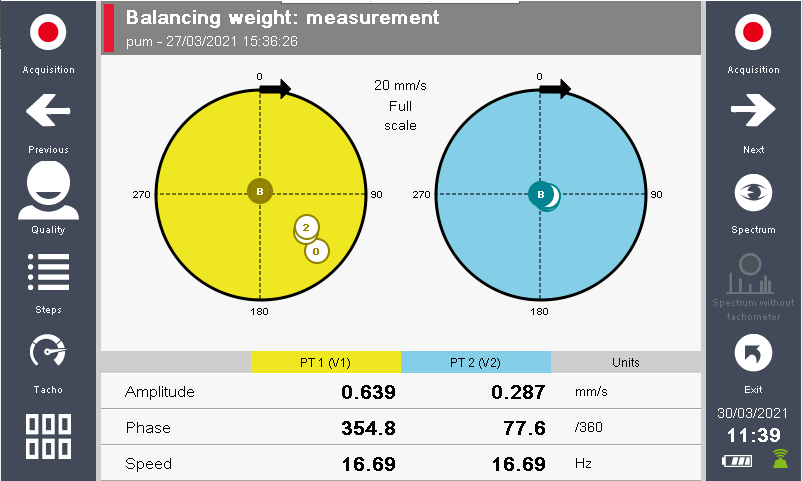
Sau khi đã lắp khối lượng thì độ rung đã giảm xuống đến 0.639 mm/s và 0.287 mm/s
Vậy là kết thúc quá trình cân bằng động Roto. Trong quá trình giảm độ rung từ 15.39 mm/s và 1.67 mm/s đã giảm xuống 0.639 mm/s và 0.287 mm/s.
Độ rung đã đạt yêu cầu theo tiêu chuẩn của nhà sản xuất.
Mọi thắc mắc về kỹ thuật cân bằng động tại hiện trường và cân bằng động tại xưởng các bạn vui lòng liên hệ với thông tin dưới đây
CÔNG TY CỔ PHẦN KỸ THUẬT THIẾT BỊ ÂU VIỆT
CHUYÊN CÂN BẰNG ĐỘNG – CÂN ĐỒNG TÂM TRỤC – PHÂN TÍCH RUNG ĐỘNG – KHỬ RUNG TÔNG THỂ – SIÊU ÂM CÔNG NGHIỆP.
ĐC: 113/4D Cống Lở, Phường 15, Quận Tân Bình, TPHCM.
SỐ ĐT: 0982 150 978 – 02873040880
Email: sales.admin@avitek.vn Website: www.avitek.vn
