Tin Tức
Cân bằng động Rotor là gì?

Sep
Với hầu hết mọi người, cân bằng động Rotor thường là một “ma thuật đen”.
Hầu hết mọi người, khi nói về cân bằng động chỉ giới hạn ở mâm xe ô tô và lốp xe phải được cân bằng trước khi lắp vào ô tô; nếu không họ sẽ bị rung tay lái, lốp mòn không đều, v.v.
Bài viết này sẽ cung cấp cho bạn cái nhìn sâu sắc về thế giới của sự cân bằng và giúp xóa bỏ “ma thuật đen”.
Cân bằng động tại hiện trường
Cân bằng động hiện trường được thực hiện bằng cách sử dụng thiết bị đo cầm tay, với một bộ cảm biến tốc độ quay và rung và phần mềm đo.
Một trong những ưu điểm của giải pháp này là khả năng cân bằng rotor trong các điều kiện hoạt động danh nghĩa và tốc độ quay thực tế của nó.
Cân bằng động tại hiện trường cho phép tiết kiệm thời gian (ví dụ: tháo / dỡ rôto khỏi bộ cân bằng) trong khi vẫn duy trì kết quả cuối cùng tốt và sát với tình trạng thực tế của máy.
Một chức năng bổ sung của thiết bị di động là đo lường và kiểm soát mức độ rung của toàn bộ máy móc.
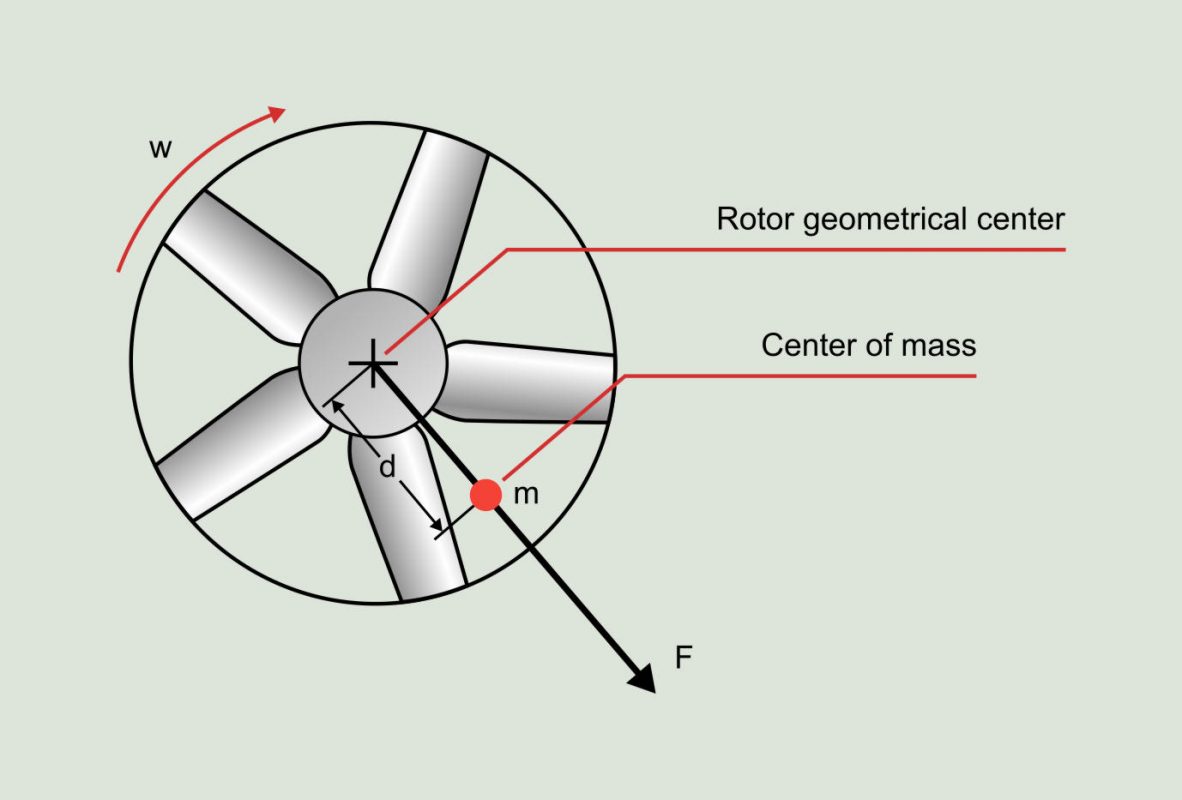
Một Rotor không cân bằng
Cân bằng động Rotor là gì?
Sự mất cân bằng tồn tại trong Rotor khi tâm khối lượng khác với tâm quay của nó.
Trên thực tế, tất cả các bộ phận mới được gia công không đối xứng do các lỗ thổi trên vật đúc, số lượng và vị trí lỗ bu lông không đồng đều, các bộ phận được lắp lệch tâm, đường kính gia công lệch tâm với vị trí ổ trục, v.v.
Bởi vì các vòng bi hạn chế lực ly tâm do không cân bằng, làm cho rôto bị rung.
Rung động này gây mòn ổ trục, tạo ra tiếng ồn không cần thiết và trong các trường hợp nghiêm trọng có thể xảy ra hiện tượng phá hủy của Rotor
Do đó cần phải giảm sự mất cân bằng đến một giới hạn có thể chấp nhận được.
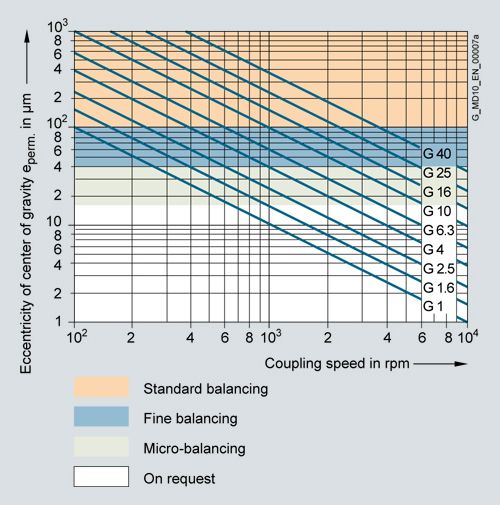
Tiêu chuẩn cân bằng động
Có các giới hạn cân bằng khác nhau với từng loại máy và tốc độ quay, giống như giới hạn gia công, ở đó sự mất cân bằng có thể chấp nhận được.
Các tiêu chuẩn quốc tế và quốc gia được trích dẫn cho Rotor,
ví dụ:. bánh xe ô tô được cân bằng đến giới hạn cấp 40 và các thiết bị điện nhỏ được cân bằng đến cấp 2,5.
Các cấp được chuyển đổi sang đơn vị không cân bằng, tùy thuộc vào tốc độ quay của Rotor theo tiêu chuẩn ISO 1940.
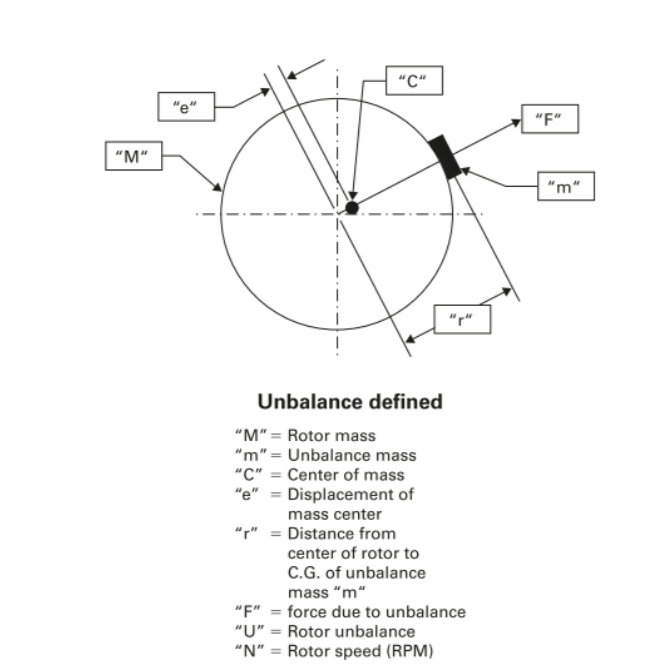
Đơn vị cân bằng động
Đơn vị của hiện tượng mất cân bằng bằng bán kính nhân lần khối lượng.
U = mr = Me
U = Me so e = U/M = mr/M
Ví dụ: một trọng lượng được thêm vào một vị trí nhất định trên Rotor đang cân bằng sẽ chuyển tâm khối lượng thành tâm quay và do đó cân bằng.
Trọng lượng hiệu chỉnh nhân với bán kính được áp dụng sẽ cho một đơn vị không cân bằng.
Đối với phép đo theo hệ mét, các đơn vị sẽ là gam-milimét (gmm) hoặc đối với Rotor lớn, gam-cm.
Tương đương với Imperial sẽ là gam-inch hoặc ounce-inch.
Trọng lượng (khối lượng) này sẽ được áp dụng tại một bán kính từ tâm quat tới vị trí cảm biến laser (hay vị trí gắn băng phản quang).
Cân bằng động Rotor là gì? (phần 1)
Để biết thêm chi tiết vui lòng liên hệ:
CÔNG TY CỔ PHẦN KỸ THUẬT THIẾT BỊ ÂU VIỆT
CHUYÊN CÂN BẰNG ĐỘNG – CÂN ĐỒNG TÂM TRỤC – PHÂN TÍCH RUNG ĐỘNG – KHỬ RUNG TÔNG THỂ – SIÊU ÂM CÔNG NGHIỆP.
ĐC: 113/4D Cống Lở, Phường 15, Quận Tân Bình, TPHCM.
SỐ ĐT: 0982 150 978 – 02873040880
Email: sales.admin@avitek.vn Website: www.avitek.vn
