Bài viết kỹ thuật, BẢO TRÌ DỰ ĐOÁN, CÂN BẰNG ĐỘNG
Cách cân bằng động # 5 – Cách Tính Trọng lượng và Vị trí Chỉnh sửa

Jul
Cách cân bằng động # 5 – Cách Tính Trọng lượng và Vị trí Chỉnh sửa
Cách cân bằng động # 5 – Cách Tính Trọng lượng và Vị trí Chỉnh sửa. Trong phần “Cách thực hiện” cuối cùng của chúng tôi, chúng tôi đã nói về quá trình chạy thử – sử dụng trọng lượng thử và vị trí, để tính toán khối lượng và vị trí của trọng lượng hiệu chỉnh, sẽ khắc phục sự mất cân bằng. Hầu hết các công cụ cân bằng hiện đại đều thực hiện phép toán cho bạn. Mặc dù các công cụ này tính toán trọng lượng và vị trí hiệu chỉnh, nhưng bạn nên hiểu rõ về cách tự thực hiện các phép tính.
Hãy nhớ rằng một trọng lượng hiệu chỉnh là một đối trọng với một điểm nặng, tức là bạn muốn trọng lượng hiệu chỉnh để chống lại các lực không cân bằng. Và một cách dễ dàng để giải thích nó là sử dụng đồ thị vector hoặc đồ thị cực. Nhiều người trong số chúng ta “bộ đếm thời gian cũ” đã thực hiện hiệu chỉnh cân bằng bằng cách sử dụng đồ thị cực.
Đây là cách nó được thực hiện:
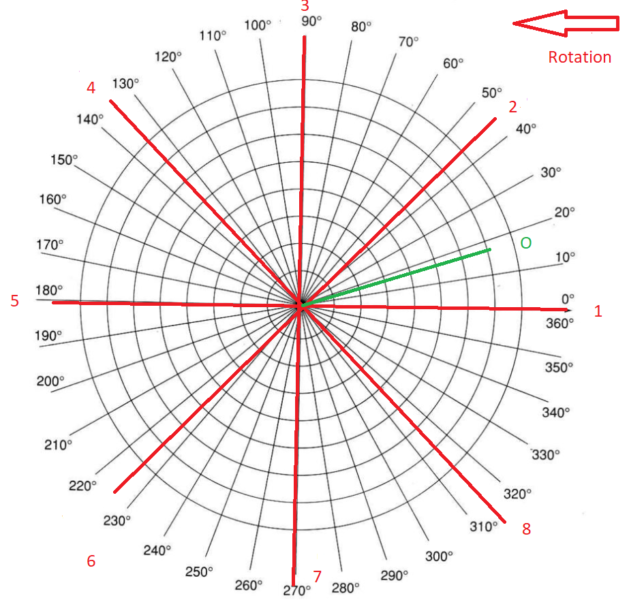
- Chúng tôi lấy một đồ thị cực và bố trí rôto của chúng tôi. Trong ví dụ của chúng tôi, chúng tôi sẽ sử dụng một quạt (8) cánh quạt. Đặt 8 dòng, cách nhau 45 độ, để biểu thị các lưỡi (được hiển thị bằng màu đỏ). Đánh số chúng liên tiếp và lưu ý hướng quay.
- Trong ví dụ của chúng tôi, độ rung ban đầu của chúng tôi là 0,36 inch / giây ở 18 độ (được hiển thị bằng màu xanh lá cây). O = .36 ips @ 18 °
- Chúng tôi vẽ một đường từ tâm của biểu đồ, trong trường hợp của chúng tôi, mỗi vòng tròn đại diện cho 0,05 ips. Vì vậy, chúng tôi vẽ một đường thẳng dài 7,2 đơn vị, hoặc “vòng tròn”, dài 18 độ.
4. Chúng tôi thêm trọng lượng thử (TW). Của chúng tôi là 50 gram ở 180 độ.
5. Chúng tôi khởi động lại quạt và đo. Độ rung của chúng ta bây giờ là O + T = .26 ips @ 121 độ.
6. Chúng tôi vẽ một đường thẳng từ O đến O + T, đặt nhãn là “T”. Chúng tôi đo chiều dài của Dòng “T” bằng cách sử dụng cùng một tỷ lệ với các vòng tròn. Trong trường hợp của chúng tôi, T = 10,4 đơn vị chiều dài.
Đây là những con số của chúng tôi:
Rung động ban đầu (O) =. 36 @ 18 ° (7,2 đơn vị)
Trọng lượng thử nghiệm (TW) = 50 gr. @ 180 °
Ban đầu + Trọng lượng thử (O + T) = .26 @ 121 °
T = (dài 10,4 đơn vị)
Để tính toán kích thước trọng lượng hiệu chỉnh của chúng tôi, chúng tôi sử dụng công thức sau:
Cân chỉnh = Trọng lượng thử x (Ban đầu / Chiều dài của dòng T) hoặc CW = TW x (O / T)
CW = 50 x (7,2 đơn vị / 10,4 đơn vị)
Trọng lượng Hiệu chỉnh của chúng tôi là 34,6 gram.
Bây giờ để tìm vị trí. Trên đồ thị của chúng ta, đi từ Đường “O” đến “O + T” là ngược chiều kim đồng hồ, với một góc thay đổi 106 °. Chúng tôi đặt Trọng lượng hiệu chỉnh của chúng tôi 106 ° theo hướng ngược lại (180 ° -106 ° = 74)
Chúng tôi loại bỏ trọng lượng thử và thêm Trọng lượng hiệu chỉnh của chúng tôi là 34,6 gram @ 74 °.
Đó là toán học. Chúng tôi cũng có thể cắt cân bằng quạt gần hơn, bằng cách tiếp tục quá trình vẽ đồ thị này một lần nữa.
Nhưng bây giờ, chúng ta có một vấn đề khác. Không có lưỡi dao chính xác ở 74 độ. Chúng ta sẽ phải chia nhỏ trọng lượng, để hai trọng lượng riêng biệt sẽ đối trọng với sự mất cân bằng. Chúng tôi có một lưỡi ở 45 ° và một ở 90 °. May mắn thay, hầu hết các máy cân bằng (bao gồm cả Fixturlaser SMC và OneProd Falcon của chúng tôi) đều có thể tính toán phân chia trọng lượng. Có một phương pháp đồ họa để thực hiện điều này, được gọi là phương pháp Hình bình hành.
Nếu bạn đã làm được điều đó đến nay, TUYỆT VỜI! Hãy vui mừng vì thiết bị cân bằng của bạn sẽ tính toán cho bạn!
